 トップページ >
トップページ >- キャンバスのとりくみ >
- 子ども霞ヶ関見学デー
子ども霞ヶ関見学デー
文部科学省で行われた親子向けのイベントでプログラミングワークショップを行いました
去年度に引き続き2年続けてプログラミングのワークショップを実施させていただきました。
今回は、株式会社アーテック様とも連携し、アーテックブロックでつくったロボットにプログラミングで命令を出して動かすという内容で午前、午後2回のワークショップを行いました。
- 開催場所
- 文部科学省
- 実施日
- 2015年7月29日(水) 10:00~12:00 / 14:00~16:00
- ワークショップ
-
工程
1.ロボットを組み立ててみよう

まずは、2人1組で説明書を読みながらペアで協力して「ティラノロボ」を組み立てていきます。
口を開け閉めする部分にはサーボモーターが使われており、DCモーターとサーボモーターの違いなども解説しながら、“ なぜサーボモーターが使われているのか? ”など理解しながら進めていきます。
2.プログラミングで動きの命令を出してみよう

組み立てた後は、口を動かすための命令をプログラミングしていきます。
ロボットに分かるような命令を出すには、
①口の開け閉めのタイミング
②口の開く角度と閉じる角度
③口を開け閉めする回数
など細かく命令を出さなければいけません。
口の角度は、角度が大きすぎるとアゴが外れてしまい、閉じる時もサーボモーターに負担がかかりすぎないように無理のない角度に調節する必要もあります。
“ティラノロボにとっての口角度は何度がベストなのか?”、ペアでその数値も調べてもらいました。
3.センサーを使ってみよう


口をパクパクさせる基本の動きが出来たら、物の有無を調べることができる赤外線フォトリフレクターをというセンサーを使って、手や物などを口に近づけた時に口が動くように発展させていきます。
物がある時、ない時の数値を調べて、条件分岐や不等号など命令を活用しながら命令のプログラムも少し複雑になってきます。
4.自由制作


ここからは、これまでやってきた事を応用してロボットの見た目やオリジナルの動きをペアで考えてもらいます。
赤外線フォトリフレクターも口や頭、背中、しっぽなどつける場所を工夫したり、エサを食べる、お話をするなどなぜ口を動かしているかなどを考えることで、場面に合わせた口の動きや道具などの工夫も行っていきます。
アーテックブロックで動くロボットをつくろう!
今回は、株式会社アーテックと共同して、アーテックブロックとスタディーノ(プログラミングするための小型の基盤)などを活用した、口を動かすことのできる恐竜ロボット「ティラノロボット」をプログラミングで動かすワークショップを行いました。
プログラミングした命令を実物のロボットが行う事でプログラミングの仕組みや面白さを体験できる内容になっています。
また、今回はスペシャルゲストとしてアーテックの宮原さん、西條さんにもご参加いただき技術的面のサポートやセンサーの仕組みなどの解説も行っていただきました!
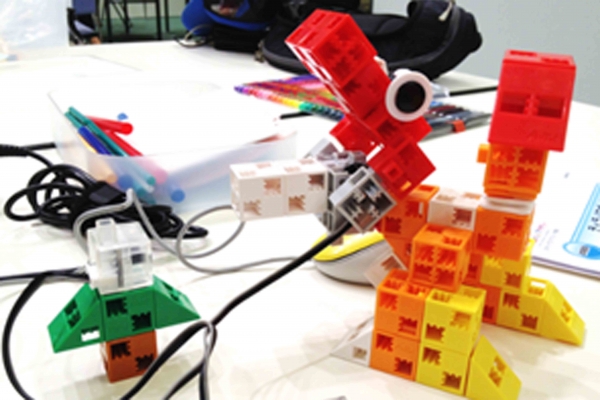
ワークショップで出来た作品からいくつがご紹介!
エサ近づけるとセンサーが反応して口を自動で動かすようにプログラミングされたロボット。
★「肉だけでは体にわるい!」という事で青汁まで用意していました!!


★エサ以外にもリボンやお友だちなども登場させたり!

★LEDを付けたり、センサーに反応して口を動かすロボット↓
★サーボモーターを足の部分に応用してボールをけるロボット

